CUAVA has reached a major milestone in our mission to launch CUAVA-2 in early 2024. We are thrilled to announce that we have received the flight model of the CROSS Star Tracker payload.
The CROSS payload for CUAVA-2 is designed to demonstrate a wide-field-of-view (WFOV) star tracker. It is designed as a compact and cost-effective star tracker that removes barriers for CubeSats to achieve high accuracy attitude determination using known positions of bright stars as a reference. The CUAVA-2 mission will provide space heritage for the CROSS team to rapidly evolve and mature the CROSS payload into a commercial product.
As a team, CROSS focuses on developing advanced optical navigation sensors, including the provision of star, horizon, celestial and space domain awareness sensors, that aim to serve national and international markets using a low-cost and modular approach. Development of the CUAVA-2 CROSS payload has been led by Joshua Critchley-Marrows, Julian Guinane, Xiaofeng Wu, and a team of undergraduate and HDR students.
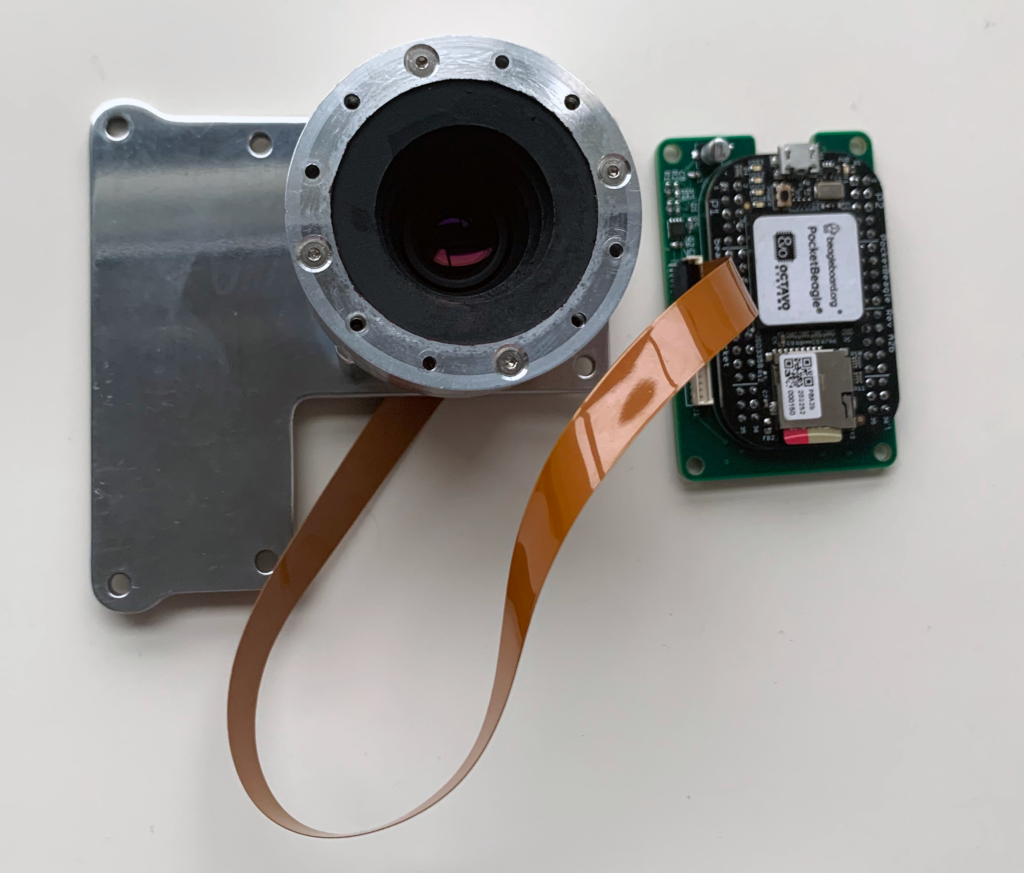
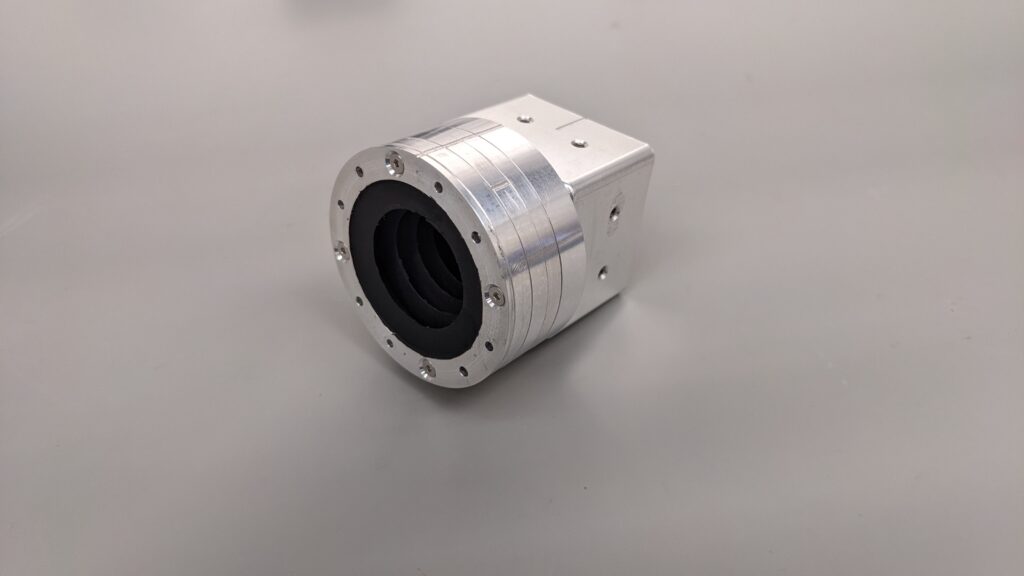
The optical subsystem of CROSS consists of a FLIR Black Fly-S 5.0MP monochrome camera with a 20-degree Field-of-View (FOV) S-Mount lens. A baffle was designed in-house to reject and absorb stray light from the Sun, Moon, and Earth. Flying this assembly allows for thermo-mechanical validation of the system in the space environment, determining the effects of vibration, thermal expansion, and contraction on the alignment of the camera with respect to the satellite. The computing subsystem of the payload features a PocketBeagle, connected to the camera via a USB 3.0 interface and to the satellite OBC via Inter-Integrated Circuit (I2C).
The full end-to-end software of the single-head star tracker will be tested on the CUAVA-2 mission, storing image and attitude estimation data on the PocketBeagle. Planned mission tests include a commissioning phase, basic functionality, and full performance tests. Depending on the test, system telemetry, measured attitude, and raw images will be saved for downlink and analysis, which can substantially improve research outcomes, allowing for refinements to both software and hardware for a final system.